噪声组成以及量子噪声
干涉仪的噪声组成
干涉仪的噪声基底由基本噪声源决定,包括量子噪声和热噪声。热噪声由干涉仪中的固定参数决定,例如材料特性和光束尺寸。而量子噪声则取决于易于调节的输入激光功率,以及(较不易调节的)信号循环镜(SRM)的透射率。其他噪声源,例如激光频率或振幅噪声、光电探测器暗噪声、执行器噪声等,被归类为"技术"噪声。通过设计控制这些技术噪声,使得每个噪声源的等效应变噪声在整个探测频带(10—7000 Hz)内不超过目标应变灵敏度的
Advanced LIGO名义运行模式的预期应变噪声谱如图2所示。在名义模式下,功率循环镜(PRM)处的输入功率为125 W,SRM透射率为
除了应变噪声谱外,探测器灵敏度的另一个标准品质因数是能够探测到双中子星(BNS)并合发出的引力波信号的距离。BNS范围定义为:在单个探测器中,一个并合事件产生匹配滤波器信噪比为8时的体积和方向平均距离[13]。图2中应变噪声曲线对应的BNS范围为190 Mpc。
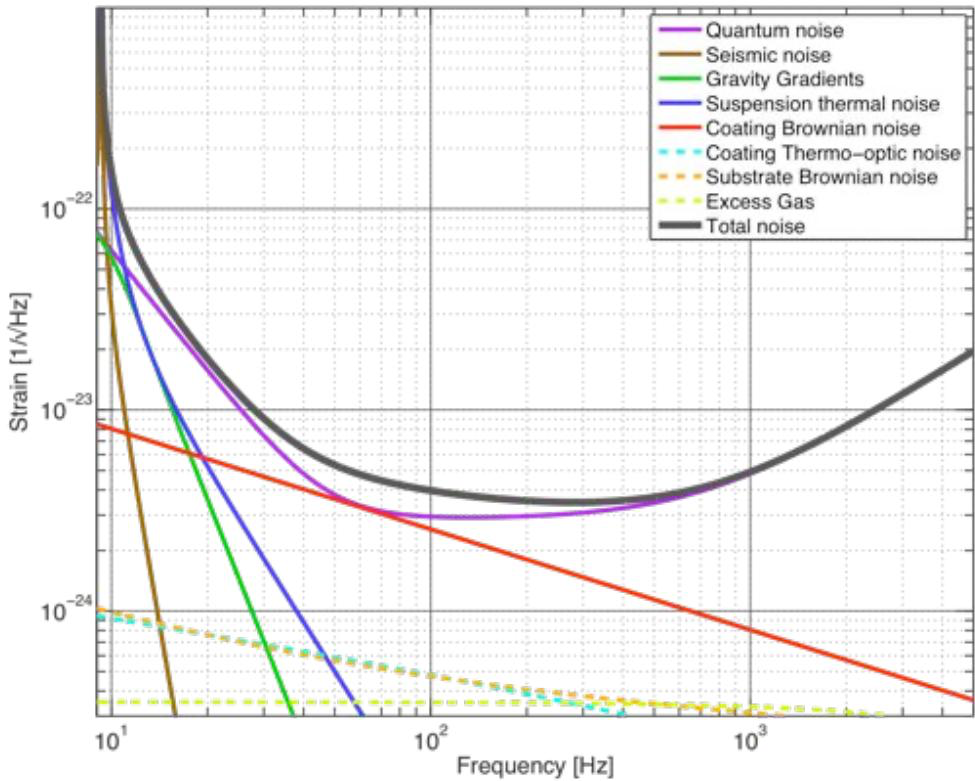 图2 Advanced LIGO名义(高功率、宽带)运行模式的主要噪声项。
图2 Advanced LIGO名义(高功率、宽带)运行模式的主要噪声项。 量子噪声
Quantum noise
量子噪声包含了探测到的光子到达率的统计涨落(散粒噪声)以及由于光子数涨落引起的辐射压力效应。量子噪声是利用 Buonanno 和 Chen [14] 的公式计算得出的。我们假设每个臂腔的往返损耗为 75 ppm,功率循环腔的损耗为
测试质量热噪声
Test mass thermal noise
镀膜布朗噪声(Coating Brownian noise)是各种测试质量热噪声项中占主导地位的一项。它源于镀膜中的机械耗散,并根据参考文献 [15] 进行计算。镀膜设计和材料参数将在 4.3 节中描述。镀膜热光噪声(Coating thermo-optic noise)源于镀膜中的热耗散,通过镀膜材料的热弹(thermoelastic)和热折射(thermorefractive)系数产生噪声。根据参考文献 [16],这两种效应是相干计算的。基底熔融石英(bulk fused silica)是基底布朗噪声项的来源。参考文献 [17] 提供了该项的计算,使用了参考文献 [18] 中建立的熔融石英体损耗和表面损耗模型。
悬挂热噪声
Suspension thermal noise
测试质量悬挂系统中的热噪声主要源于最终悬挂级所使用的熔融石英纤维中的损耗。正如悬挂设计章节(4.4.2)所述,这四根玻璃纤维具有圆形但直径可变的截面:它们在纤维的主体(中间)部分较细,而在两端附近大约厚两倍。这种几何形状在最小化热噪声的同时,保持了纤维的小提琴模式频率较高(基频 510 Hz)和垂直拉伸模式频率较低(9 Hz)。热噪声是利用末级悬挂的有限元模型计算的,其中包括了纤维材料的体损耗、表面损耗和热弹分量的损耗项 [19]。
重力梯度
Gravity gradients
地震波会在测试质量附近的地球内部产生密度扰动,进而对质量产生波动的引力。这种地震重力梯度噪声是利用参考文献 [20] 的传递函数公式以及一个观测站台址地震运动的代表性模型估算出来的。后者随时间变化可能很大,预计在某些时间段内,重力梯度噪声会比图 2 所示高出数倍 [21]。
图 2 还显示了地震噪声通过隔振和悬挂系统传递到测试质量的应变噪声(“Seismic noise”曲线)。由于巨大的机械隔离作用,这种噪声在 11 Hz 以上可以忽略不计。
残余气体噪声
Residual gas noise
虽然未包含在图 2 的噪声曲线中,但测试质量真空室中的残余气体会对测试质量悬挂产生一定的阻尼,可能会增加悬挂热噪声。这种阻尼效应由于测试质量与其悬挂的反作用质量(reaction mass)之间相对狭窄的间隙而增强——即所谓的薄膜阻尼(thin-film damping)[23]。气体阻尼噪声在 10—40 Hz 频带内最为显著,在该频带内它几乎随
其他运行模式
如上所述,可以改变激光输入功率和信号循环腔参数,以实现与图 2 代表的名义模式不同的运行模式。我们用两种特定的替代干涉仪模式来说明潜在的参数空间:一种针对低输入功率优化的模式;一种针对双中子星(BNS)探测优化的模式。低功率模式之所以受关注,是因为实现全功率运行可能需要较长的调试时间;因此,早期的运行和观测将在降低功率的情况下进行。BNS 优化模式展示了针对这一特定源的潜在灵敏度,以及相应的宽带灵敏度折衷。表 2 给出了这两种模式的参数,图 3 显示了它们的应变噪声谱。
表 2 两种替代运行模式的干涉仪参数
| 模式 (Mode) | 输入功率 (Input power) | SRM 透射率 (SRM transmission) | SRC 失谐 (SRC detuning) | BNS 范围 (BNS range) |
|---|---|---|---|---|
| 低功率 (Low power) | 25 W | 35% | 0 | 160 Mpc |
| BNS 优化 (BNS optimized) | 125 W | 20% | 16 deg. | 210 Mpc |
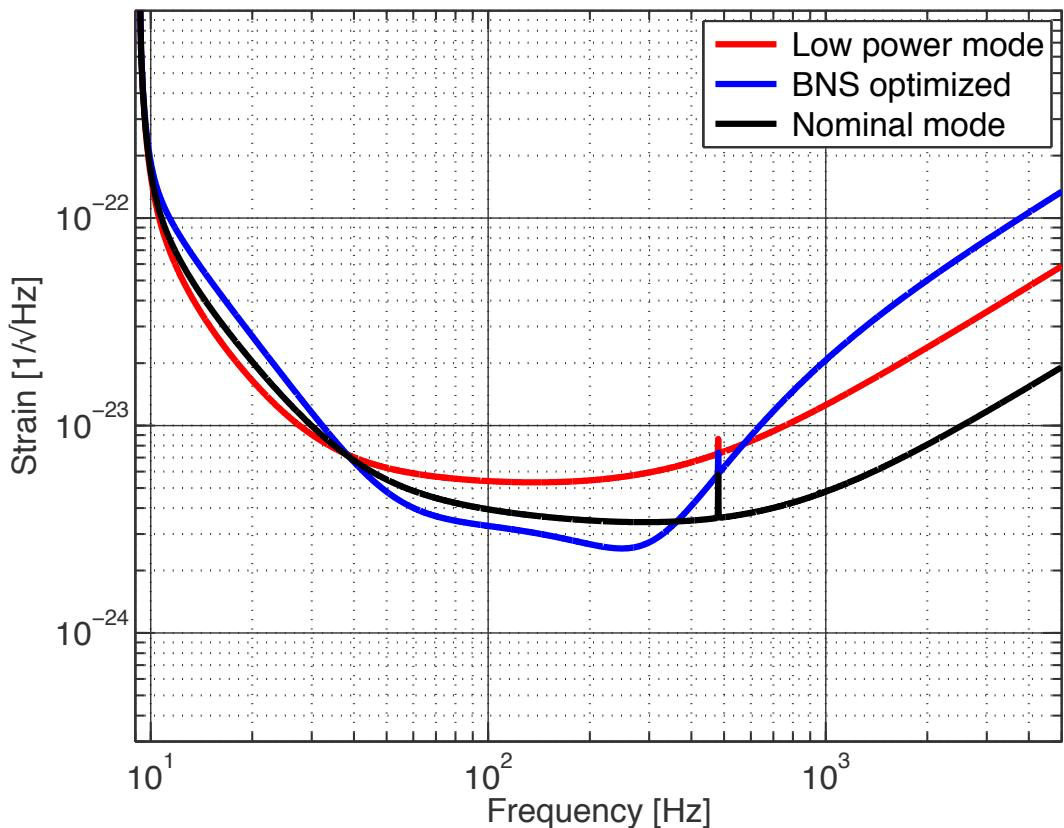 图3 对应于表2定义的模式以及图2所示名义灵敏度的Advanced LIGO应变噪声谱。$500\ \mathrm{Hz}$处的特征是测试质量悬挂光纤的(未解析的)基频振动模式。
图3 对应于表2定义的模式以及图2所示名义灵敏度的Advanced LIGO应变噪声谱。$500\ \mathrm{Hz}$处的特征是测试质量悬挂光纤的(未解析的)基频振动模式。 量子噪声
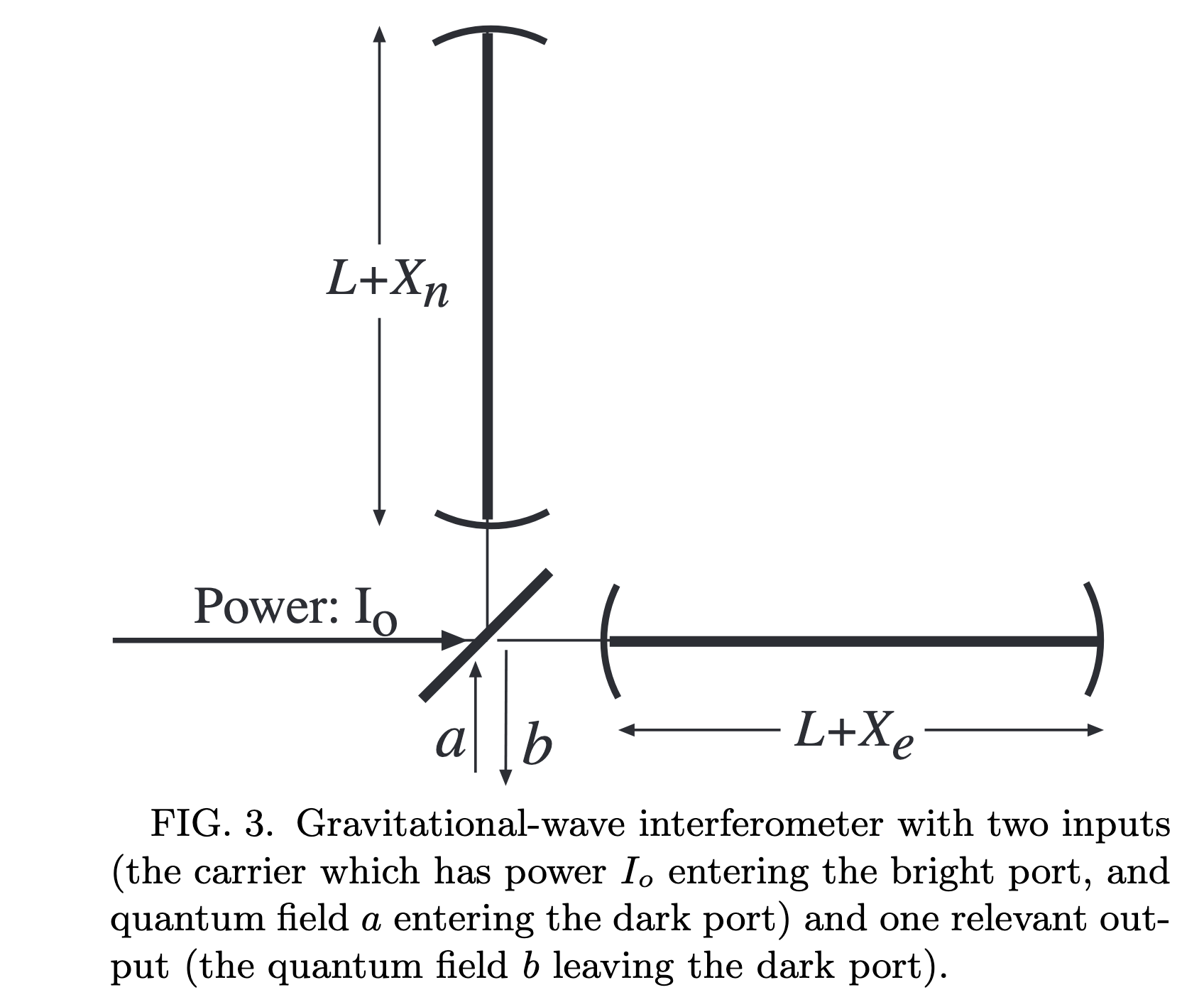
Dark Port 端的光场输出
假设 dark port 端的输入是
其中频域的产生湮灭算符满足对易关系
对于频谱进行一个拆分,在中心频率
此时对易关系变为
并且可以把 dark port 的输入端改写为
这个表达式进行了近似,注意到
把输入信号改写成形式
对于 dark port 端的输出信号,我们只要替换上式中的产生湮灭算符,就可以在三角基底下将其表示为
其中
出入射光场之间的关系
为了得到
Beam Splitter 处的传递
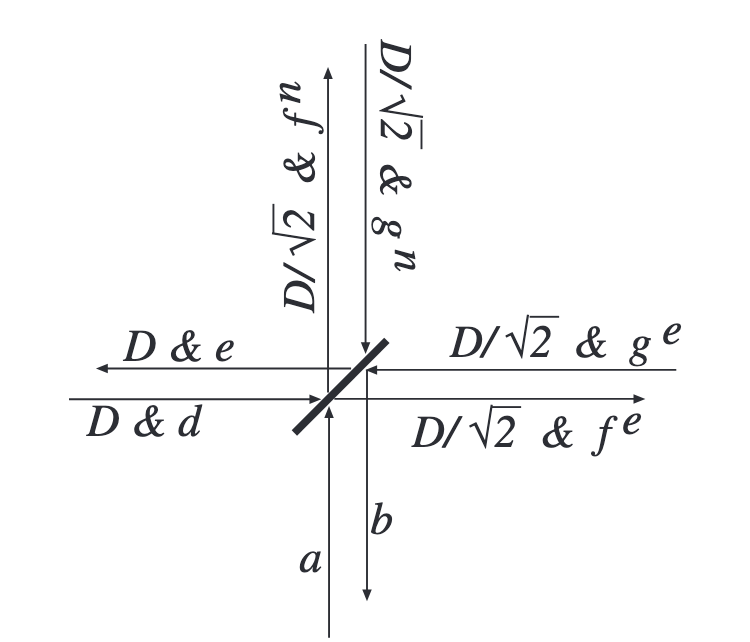
对于 splitter mirror 处 bright port 的入射电场,可以写成激光和量子噪声的叠加
转换到两个 quadrature 的基底上
所以在 beam splitter 处几个端口的场可以用下图的关系表示
腔内的传递
假设腔的 front mirror 和 back mirror 的能量反、透射率分别是
以及
腔外到内的振幅反射系数多一个负号。
上图表示了腔内各个分量(激光和噪声)的传递,其中的
即腔锁相之后对于振幅的放大作用,然后因子
由上图的边界条件,可以得到噪声项之间的关系为
我们现在加入引力波对于腔内光场的影响。假设 carrier light 在打到镜面上的时候腔的长度是
所以引力波在这里的效果实际上是把一部分的 carrier light 给挤到了 side band 里面!这个效果用 annihilation and creation operators 可以表示为
所以在 back mirror 处的 operator 之间的关系可以表示为
把 back mirror 公式中的
为了简化它,使用 Resonant Approximation
- 假设镜子反射率极高(
) - 假设 side band 频率
远小于自由光谱范围( ),所以 - 引入腔的半带宽
和损耗修正
经过近似分母变成了极其简洁的形式:
所以腔内的循环功率
涨落
这个光强涨落公式纯粹是由真空散粒噪声(
镜子的运动
腔内的光强在不断随机涨落,这就意味着打在镜子上的辐射压力也在随机抖动。镜子受到的辐射压波动产生的力是
我们关心的是两条臂的位移之差
:引力波信号带来的位移 :由辐射压噪声导致的随机位移
定义
最后得到
其中
这就是 Ponderomotive effect,即散粒噪声
腔的输出场
根据前镜的反射公式,把前面求出来的腔内场代进去,经过和分母一样的 Resonant Approximation,化简后得到离开单条臂的输出场
其中
它清晰地展示了 F-P 腔的三大输出成分
- 第一项(输入反射):输入的量子噪声
原路反回,但带上了一个频变相移 ,并且因为吸收损耗衰减了 - 第二项(损耗噪声):从后镜漏进来的外接真空噪声
- 第三项(信号泄漏):在腔内诞生的引力波信号
分束镜输出
从北臂出来的光
所以二者合成之后得到
对于量子噪声项(第一、二项):共模的激光器噪声被完美抵消,只剩下
对于信号项(第三项):代入前面求得的镜子差动位移
如果我们忽略 end mirror 处的损耗并且代入
噪声谱
从上面的输出表达式中,我们关心的
所以对应的噪声谱是
利用关系
所以量子噪声谱可以表示为
压缩
Rotation 和 Squeeze 算符
rotation 算符
这个算符是 Unitary 的,并且逆为
这个算符作用在光场上的行为是
这个性质可以利用公式
所以 rotation 算符在
squeeze 算符的定义则是
这个算符也是 Unitary 的,并且逆为
这个算符作用在光场上的行为是
这个性质同样可以利用公式
利用算符描述噪声传递
上述推导出的量子噪声传递
用两个算符重新表示,就是
其中
所以
可以得到
利用真空态在旋转下不变的性质
所以在没有旋转的时候
那么我们在把噪声扭转一个角度
计算得到
压缩噪声
我们可以在 dark port 输入之前给它上一个压缩,来减少最后的量子噪声。所谓的 squeezed-input 可以表示成
所以最后的噪声就是
把压缩算符提进去
其中
带入
计算得到
所以总的噪声谱就是
其中
Detuned Interferometer 噪声谱
为了减少在特定频率出的量子噪声,可以通过 detuned interferometer 的方法来减小窄带内的量子噪声。